Another version
Jetson NANO Transbot ROS Robot
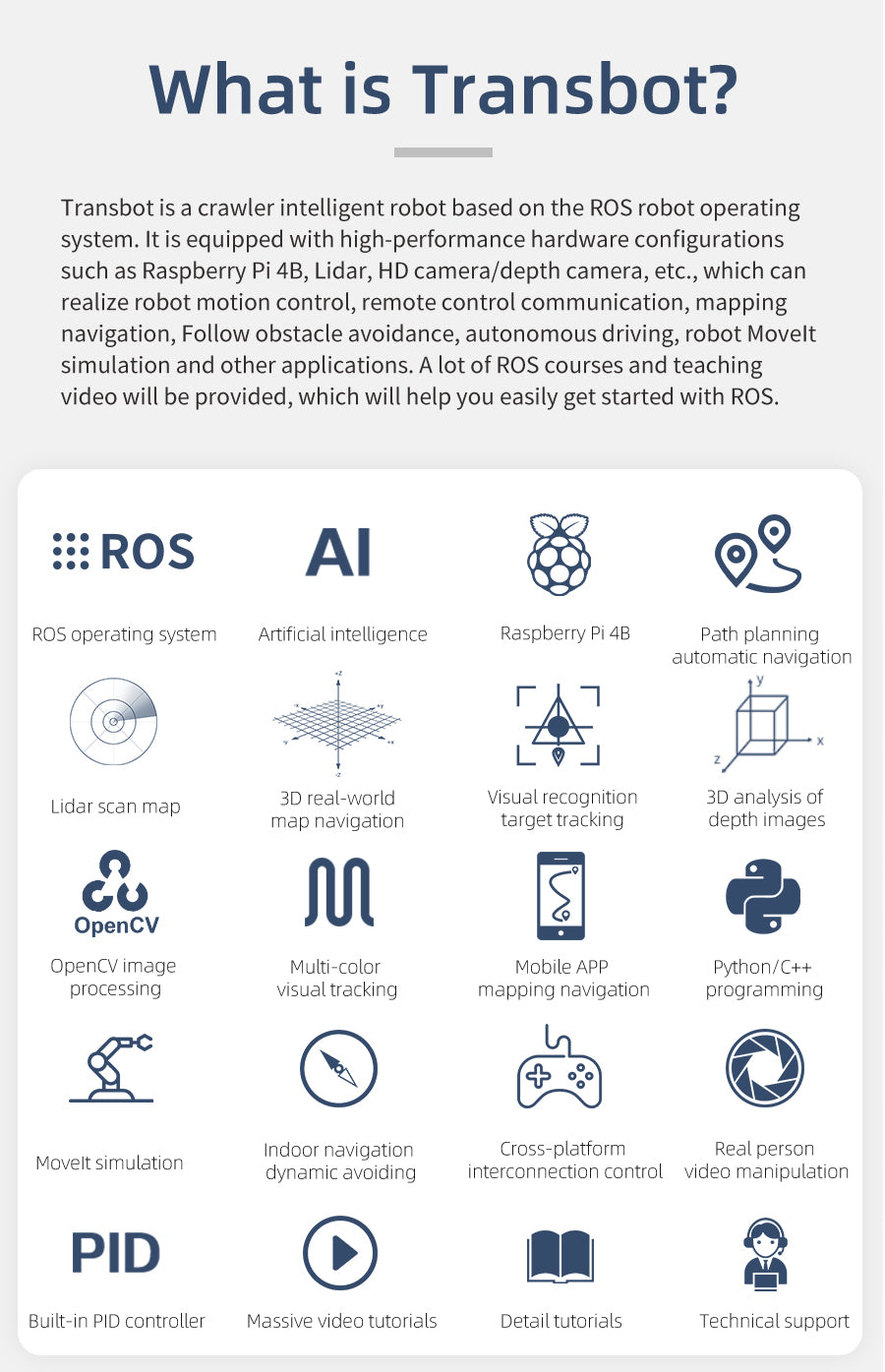
Transbot is a crawler educational robot developed based on the ROS(robot operating system). It uses Python 3 as the programming language. And comes with high-performance hardware configurations such as Raspberry Pi 4B board, lidar, high-definition camera/depth camera, etc., which can realize robot motion control, remote communication, mapping navigation, following, avoiding, autopilot, robotic arm Movelt simulation, multi-robot queue, multi-robot navigation and so on. We will provide many ROS courses and teaching video to help user get started with ROS easily.
Features:
Intimate design and service: The chassis has been assembled before shipment. The TF card comes with Transbot dedicated system files. Only need to assemble the Raspberry Pi, camera and other parts, and you can quickly enjoy it.
Professional technical support and after-sales service.
Stable hardware configuration realizes interesting functions:
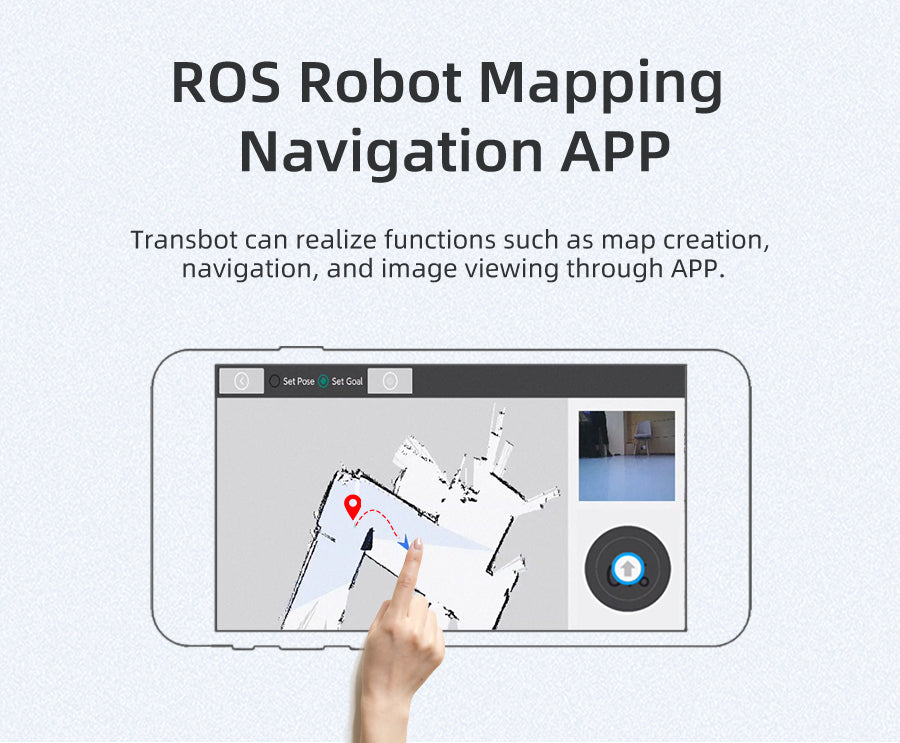
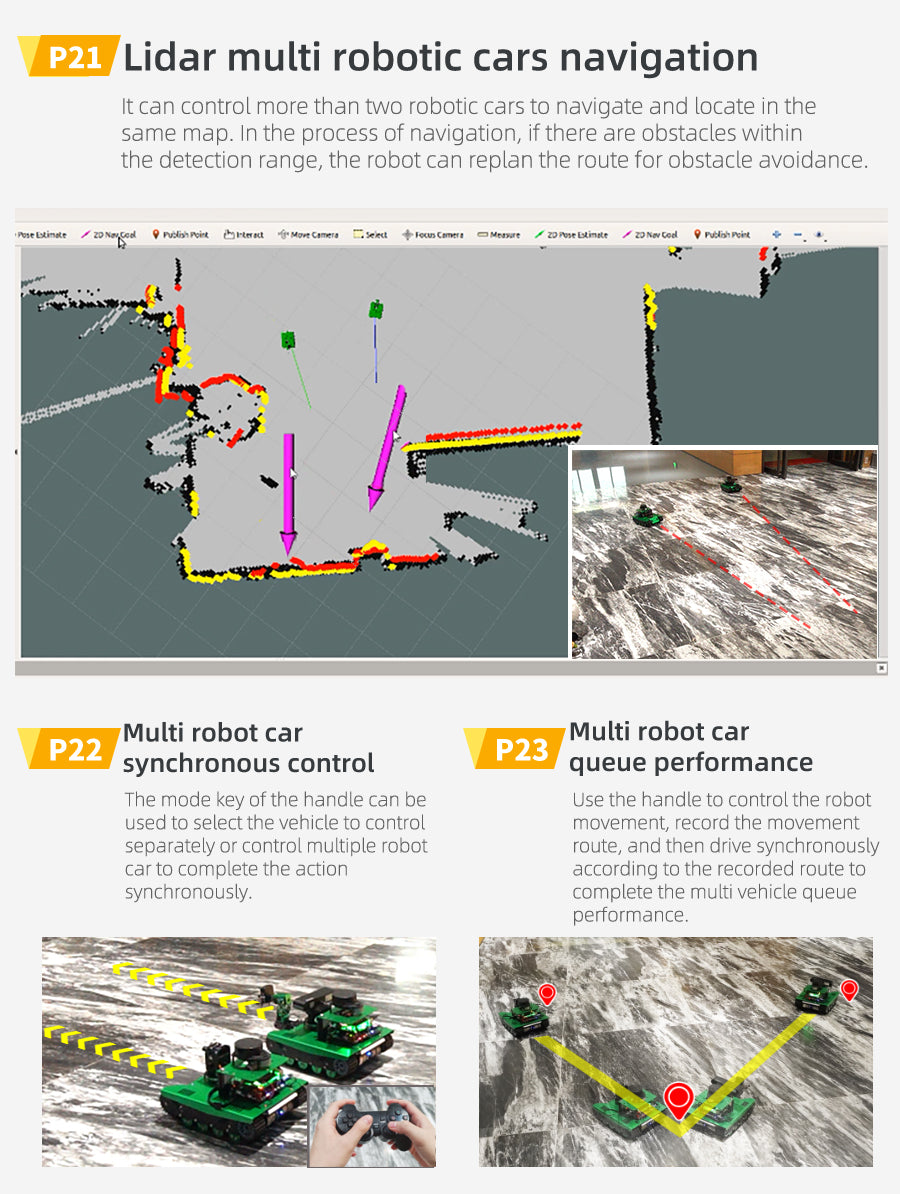
Based on lidar: Obstacle avoidance, following, 2D mapping navigation, multi-robot navigation, etc.
Based on depth camera: 3D mapping, point cloud image processing, KCF target visual following, etc.
Based on a HD camera: High-brightness searchlight, 2 DOF PTZ flexible rotation.
ROS operating system: Based on the ROS robot operating system, we cleverly use Rviz, Movelt, and Qt toolboxes to realize the joint control of the robot arm Movelt simulation and the real machine.
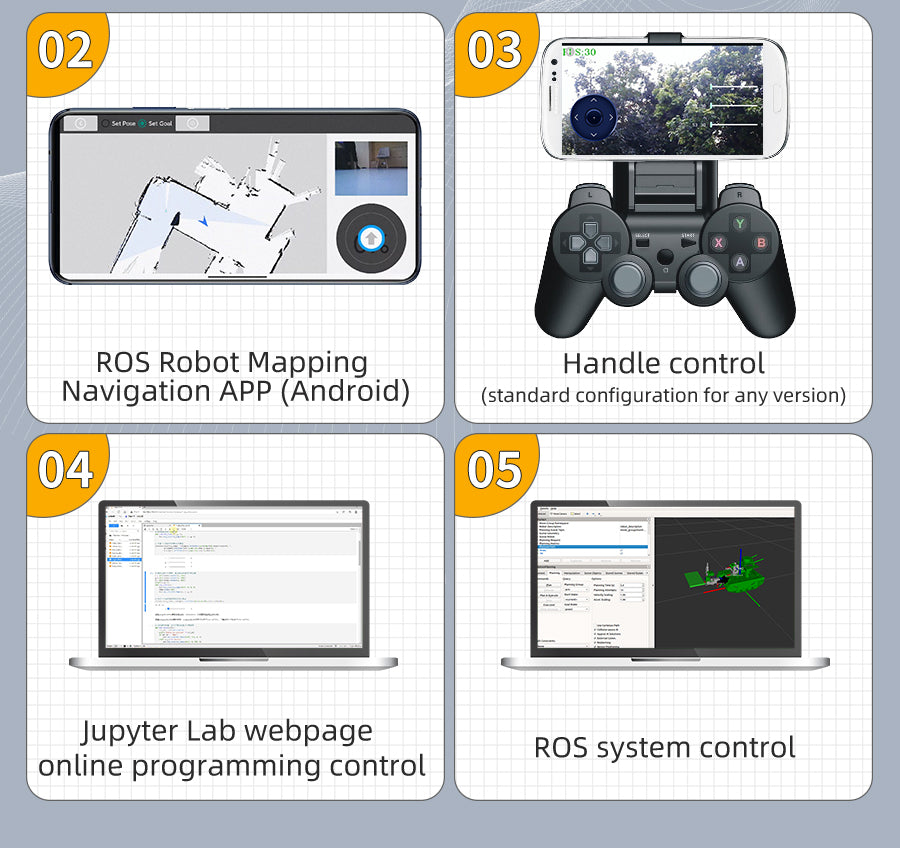
Cross-platform interconnection control: It support a variety of different control methods, AI-enabled APP, FPV real-view visual handle remote control, JupyterLab online programming, and robot operating system control.
Detailed video courses: We provide 64-hours video tutorials and detailed documents. Whether you are a beginner or an experienced ROS player, you can easily use Transbot robot.
























Details


Packing list





Tutorial link
Yahboom Raspberry Pi Transbot Robot



Add A Review
Your email address will not be published. Required fields are marked
Your Rating